Robust GNSS-based Vehicle Localization in Urban Environments (2012-2013)
A common challenge for vehicle localization based on global navigation satellite systems (GNSS) is the multipath and non-line-of-sight (NLOS) problem.
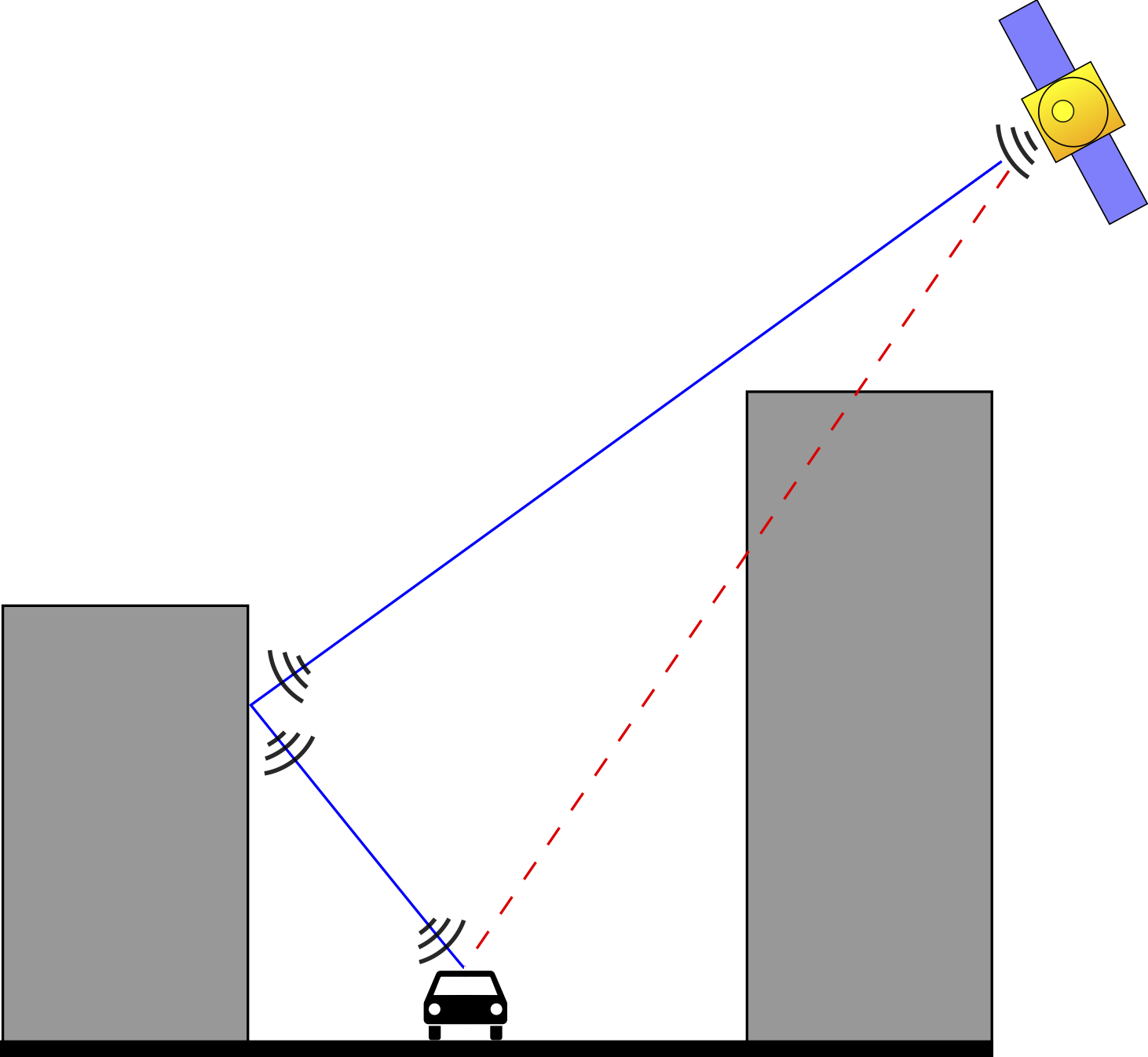
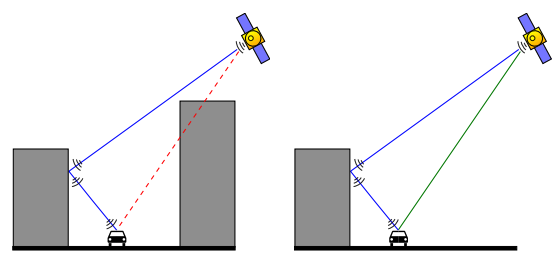
This problem occurs for instance in urban areas with high buildings: Although the direct line of sight to a satellite is blocked by a building, its signal may still reach the receiver on the ground via one or several reflections on building structures or the ground. Since the signal path is longer for the reflected signal, ranging errors occur that can either prolongate the observed pseudorange or, due to correlation effects, shorten it.
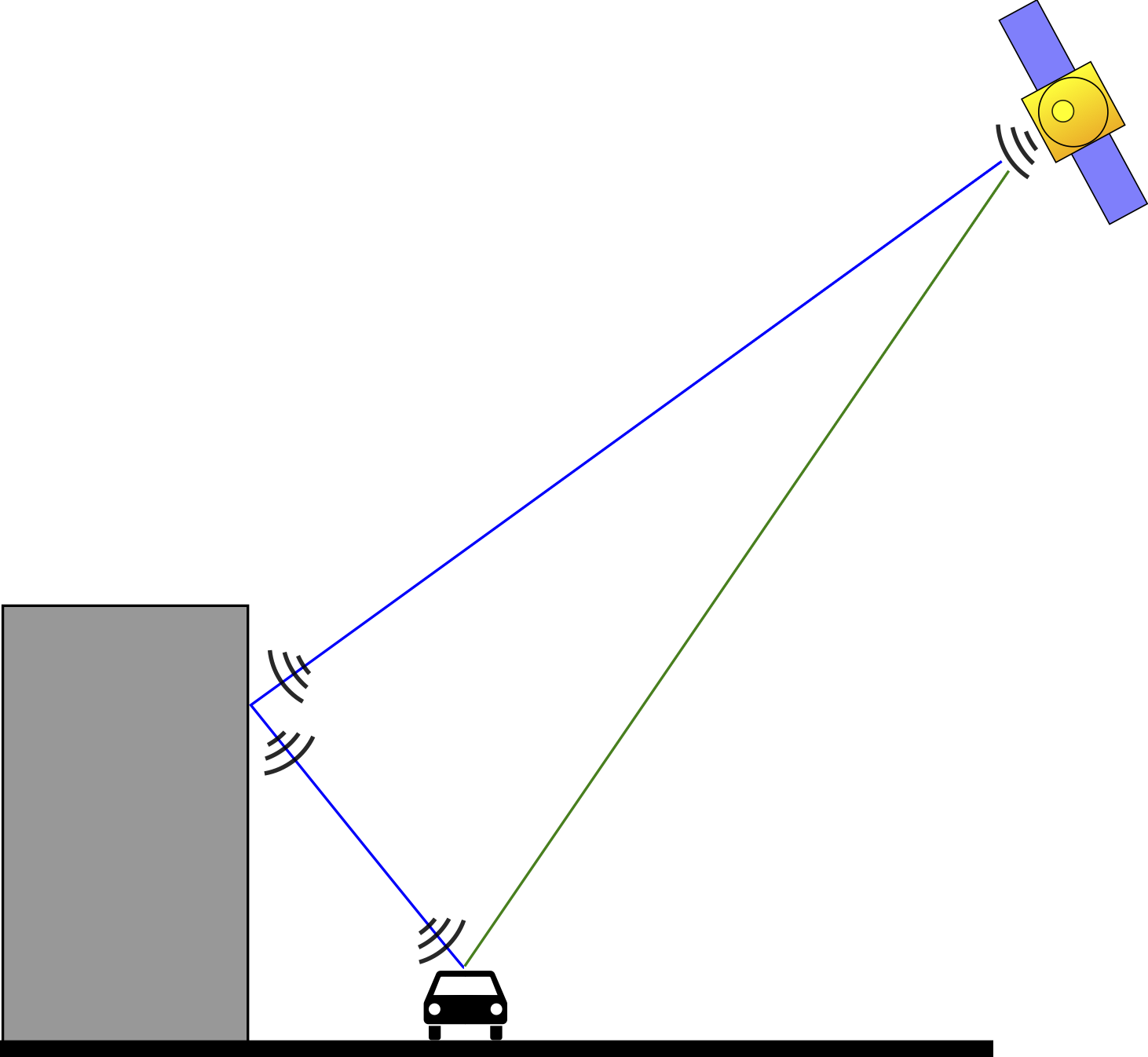
Multipath effects can also occur when the direct line of sight is free. In this situation, the signal is received directly, but is also reflected on a building or another structure in the vicinity of the receiver. Hence the signal is received multiple times, leading to correlation errors. The observations that are subject to multipath effects can be considered outliers that can severely bias the least squares estimate of the receiver’s position. Even a single multipath measurement can lead to a defective position estimate. The problem gets worse if one considers that in urban environments not only one, but several satellite observations might be affected by multipath effects.
Our Approach
 Our work transfers the concept of switchable constraints from the field of SLAM (Simultaneous Localization and Mapping) in robotics to the domain of GNSS-based localization.
Our work transfers the concept of switchable constraints from the field of SLAM (Simultaneous Localization and Mapping) in robotics to the domain of GNSS-based localization.
The switchable constraints approach is very versatile and can be applied to other least squares problems where outliers have to be expected. Therefore we could successfully transfer the gained insights from SLAM into the domain of GNSS-based localization. Our papers (see below) demonstrate how multipath observations can be identified and rejected during the least squares optimization that solves for the position estimate, without additional a priori knowledge or additional sensor information.
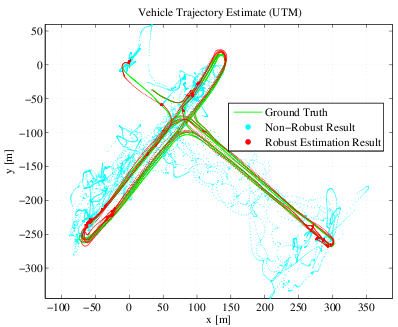
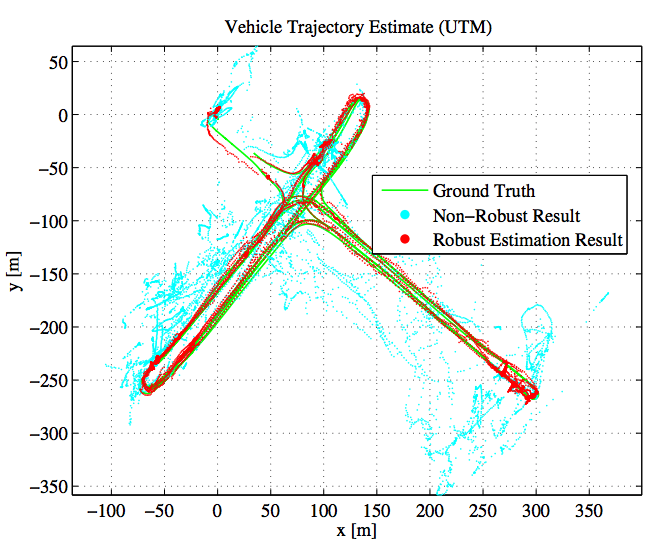
We provide an introduction to factor graphs and how the GNSS-based localization problem can be expressed using such a graph structure. This will help the reader to understand the key idea of the proposed robust optimization scheme. The image on the right presents results acquired from a real-world dataset and compares our proposed solution against a highly accurate ground truth.
Publications
-
Switchable Constraints and Incremental Smoothing for Online Mitigation of Non-Line-of-Sight and Multipath Effects In Proc. of IEEE Intelligent Vehicles Symposium (IV), 2013.
 Reliable vehicle positioning is a crucial requirement
for many applications of advanced driver assistance
systems. While satellite navigation provides a reasonable performance
in general, it often suffers from multipath and non-line-of-sight
errors when it is applied in urban areas and therefore
does not guarantee consistent results anymore. Our paper
proposes a novel online method that identifies and excludes
the affected pseudorange measurements. Our approach does
not depend on additional sensors, maps, or environmental
models. We rather formulate the positioning problem as a
Bayesian inference problem in a factor graph and combine
the recently developed concept of switchable constraints with
an algorithm for efficient incremental inference in such graphs.
We furthermore introduce the concepts of auxiliary updates and
factor graph pruning in order to accelerate convergence while
keeping the graph size and required runtime bounded. A realworld
experiment demonstrates that the resulting algorithm is
able to successfully localize despite a large number of satellite
observations are influenced by NLOS or multipath effects.
Reliable vehicle positioning is a crucial requirement
for many applications of advanced driver assistance
systems. While satellite navigation provides a reasonable performance
in general, it often suffers from multipath and non-line-of-sight
errors when it is applied in urban areas and therefore
does not guarantee consistent results anymore. Our paper
proposes a novel online method that identifies and excludes
the affected pseudorange measurements. Our approach does
not depend on additional sensors, maps, or environmental
models. We rather formulate the positioning problem as a
Bayesian inference problem in a factor graph and combine
the recently developed concept of switchable constraints with
an algorithm for efficient incremental inference in such graphs.
We furthermore introduce the concepts of auxiliary updates and
factor graph pruning in order to accelerate convergence while
keeping the graph size and required runtime bounded. A realworld
experiment demonstrates that the resulting algorithm is
able to successfully localize despite a large number of satellite
observations are influenced by NLOS or multipath effects.
-
Incremental Sensor Fusion in Factor Graphs with Unknown Delays In Proc. of ESA Symposium on Advanced Space Technologies in Robotics and Automation (ASTRA), 2013.
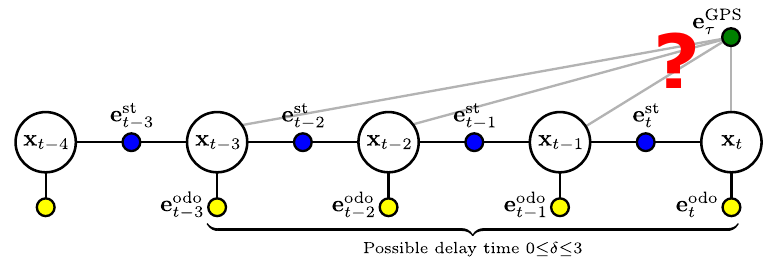 Our paper addresses the problem of performing
incremental sensor fusion in factor graphs when
some of the sensor information arrive with a significant
unknown delay. We develop and compare two techniques
to handle such delayed measurements under mild conditions
on the characteristics of that delay: We consider
the unknown delay to be bounded and quantizable into
multiples of the state transition cycle time. The proposed
methods are evaluated using a simulation of a dynamic
3-DoF system that fuses odometry and GPS measurements.
Our paper addresses the problem of performing
incremental sensor fusion in factor graphs when
some of the sensor information arrive with a significant
unknown delay. We develop and compare two techniques
to handle such delayed measurements under mild conditions
on the characteristics of that delay: We consider
the unknown delay to be bounded and quantizable into
multiples of the state transition cycle time. The proposed
methods are evaluated using a simulation of a dynamic
3-DoF system that fuses odometry and GPS measurements.
-
Multipath Mitigation in GNSS-Based Localization using Robust Optimization In Proc. of IEEE Intelligent Vehicles Symposium (IV), 2012.
 Our paper adapts recent advances in the SLAM
(Simultaneous Localization and Mapping) literature to the
problem of multipath mitigation and proposes a novel approach
to successfully localize a vehicle despite a significant
number of multipath observations. We show that GNSS-based
localization problems can be modelled as factor graphs and
solved using efficient nonlinear least squares methods that
exploit the sparsity inherent in the problem formulation. Using
a recently developed novel approach for robust optimization,
satellite observations that are subject to multipath errors can be
successfully identified and rejected during the optimization process.
We demonstrate the feasibility of the proposed approach
on a real-world urban dataset and compare it to an existing
method of multipath detection.
Our paper adapts recent advances in the SLAM
(Simultaneous Localization and Mapping) literature to the
problem of multipath mitigation and proposes a novel approach
to successfully localize a vehicle despite a significant
number of multipath observations. We show that GNSS-based
localization problems can be modelled as factor graphs and
solved using efficient nonlinear least squares methods that
exploit the sparsity inherent in the problem formulation. Using
a recently developed novel approach for robust optimization,
satellite observations that are subject to multipath errors can be
successfully identified and rejected during the optimization process.
We demonstrate the feasibility of the proposed approach
on a real-world urban dataset and compare it to an existing
method of multipath detection.
-
Robust Optimization for Simultaneous Localization and Mapping PhD Thesis. Chemnitz University of Technology 2012.