Autonomous Quadrotor UAVs (2007 - 2009)
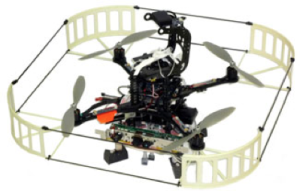 In 2007 we started working with quadrotors by using 3 AscTec Hummingbirds shortly after they became available. From the beginning, our research has focused on fully autonomous systems in indoor/GPS-denied environments without external sensors or computation. Since this required additional on-board sensors and computing power we got an AscTec Pelican quadrotor in 2010 because of its higher available payload.
In 2007 we started working with quadrotors by using 3 AscTec Hummingbirds shortly after they became available. From the beginning, our research has focused on fully autonomous systems in indoor/GPS-denied environments without external sensors or computation. Since this required additional on-board sensors and computing power we got an AscTec Pelican quadrotor in 2010 because of its higher available payload.
The results of several projects using these MAVs with additional sensors and modifications have been published in a number of papers, e.g. an autonomous landing procedure by using a camera and a self-made optical flow sensor or one of the first autonomous indoor flights using a Kinect on the Pelican. This work has been conducted in close collaboration with Sven Lange and other colleagues at Chemnitz University of Technology. Check out their project website for up-to-date information.
Publications
-
Incremental Smoothing vs. Filtering for Sensor Fusion on an Indoor UAV In Proc. of Intl. Conf. on Robotics and Automation (ICRA), 2013.
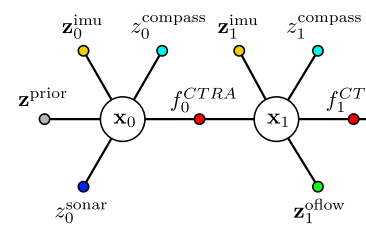 Our paper explores the performance of a recently proposed incremental smoother in the context of nonlinear sensor fusion for a real-world UAV. This efficient factor graph based smoothing approach has a number of advantages compared to conventional filtering techniques like the EKF or its variants. It can more easily incorporate asynchronous and delayed measurements from sensors operating at different rates and is supposed to be less error-prone in highly nonlinear settings. We compare the novel incremental smoothing approach based on iSAM2 against our conventional EKF based sensor fusion framework. Unlike previously presented work, the experiments are not only performed in simulation, but also on a real-world quadrotor UAV system using IMU, optical flow and altitude measurements.
Our paper explores the performance of a recently proposed incremental smoother in the context of nonlinear sensor fusion for a real-world UAV. This efficient factor graph based smoothing approach has a number of advantages compared to conventional filtering techniques like the EKF or its variants. It can more easily incorporate asynchronous and delayed measurements from sensors operating at different rates and is supposed to be less error-prone in highly nonlinear settings. We compare the novel incremental smoothing approach based on iSAM2 against our conventional EKF based sensor fusion framework. Unlike previously presented work, the experiments are not only performed in simulation, but also on a real-world quadrotor UAV system using IMU, optical flow and altitude measurements.
-
Autonomous Corridor Flight of a UAV Using a Low-Cost and Light-Weight RGB-D Camera In Proc. of Intl. Symposium on Autonomous Mini Robots for Research and Edutainment (AMiRE), 2011.
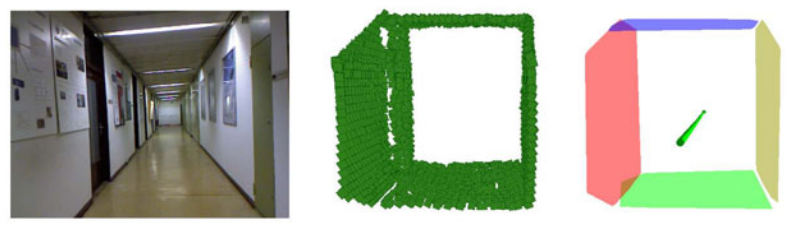 We describe the first application of the novel Kinect RGB-D sensor on a fully autonomous quadrotor UAV. In contrast to the established RGB-D devices that are both expensive and comparably heavy, the Kinect is light-weight and especially low-cost. It provides dense color and depth information and can be readily applied to a variety of tasks in the robotics domain. We apply the Kinect on a UAV in an indoor corridor scenario. The sensor extracts a 3D point cloud of the environment that is further processed on-board to identify walls, obstacles, and the position and orientation of the UAV inside the corridor. Subsequent controllers for altitude, position, velocity, and heading enable the UAV to autonomously operate in this indoor environment.
We describe the first application of the novel Kinect RGB-D sensor on a fully autonomous quadrotor UAV. In contrast to the established RGB-D devices that are both expensive and comparably heavy, the Kinect is light-weight and especially low-cost. It provides dense color and depth information and can be readily applied to a variety of tasks in the robotics domain. We apply the Kinect on a UAV in an indoor corridor scenario. The sensor extracts a 3D point cloud of the environment that is further processed on-board to identify walls, obstacles, and the position and orientation of the UAV inside the corridor. Subsequent controllers for altitude, position, velocity, and heading enable the UAV to autonomously operate in this indoor environment.
-
Autonomous Corridor Flight of a UAV Using an RGB-D Camera In Proc. of EuRobotics RGB-D Workshop on 3D Perception in Robotics, 2011.
 We describe the first application of the novel Kinect RGB-D sensor on a fully autonomous quadrotor UAV. We apply
the UAV in an indoor corridor scenario. The position and
orientation of the UAV inside the corridor is extracted from
the RGB-D data. Subsequent controllers for altitude, posi-
tion, velocity, and heading enable the UAV to autonomously
operate in this indoor environment.
We describe the first application of the novel Kinect RGB-D sensor on a fully autonomous quadrotor UAV. We apply
the UAV in an indoor corridor scenario. The position and
orientation of the UAV inside the corridor is extracted from
the RGB-D data. Subsequent controllers for altitude, posi-
tion, velocity, and heading enable the UAV to autonomously
operate in this indoor environment.
-
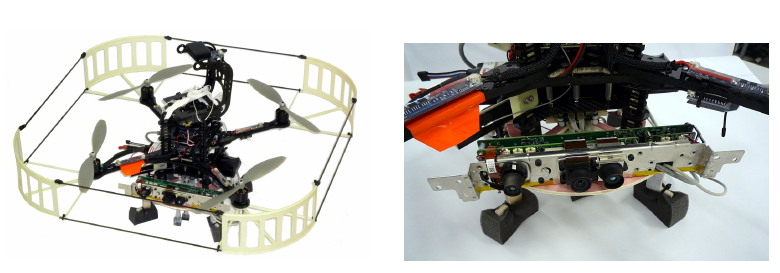
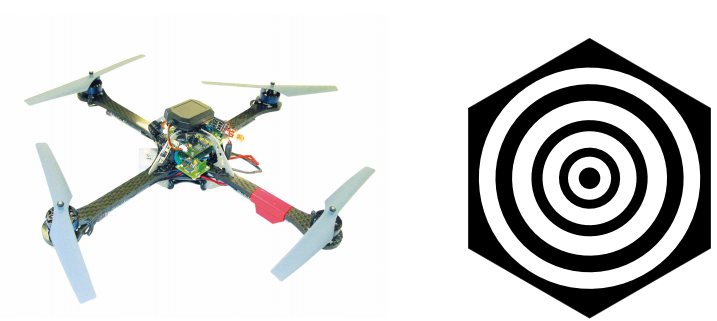
A Vision Based Onboard Approach for Landing and Position Control of an Autonomous Multirotor UAV in GPS-Denied Environments In Proc. of Intl. Conf. on Advanced Robotics (ICAR), 2009.
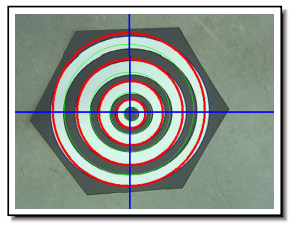 We describe our work on multirotor UAVs and
focus on our method for autonomous landing and position
control. The paper describes the design of our landing pad
and the vision based detection algorithm that estimates the 3Dposition
of the UAV relative to the landing pad. A cascaded
controller structure stabilizes velocity and position in the
absence of GPS signals by using a dedicated optical flow sensor.
Practical experiments prove the quality of our approach.
We describe our work on multirotor UAVs and
focus on our method for autonomous landing and position
control. The paper describes the design of our landing pad
and the vision based detection algorithm that estimates the 3Dposition
of the UAV relative to the landing pad. A cascaded
controller structure stabilizes velocity and position in the
absence of GPS signals by using a dedicated optical flow sensor.
Practical experiments prove the quality of our approach.
-
Autonomous Landing for a Multirotor UAV Using Vision In Workshop Proc. of SIMPAR 2008 Intl. Conf. on Simulation, Modeling and Programming for Autonomous Robots, 2008.
 We describe our work on multirotor UAVs and focus on our
method for autonomous landing. The paper describes the design of our
landing pad and its advantages. We explain how the landing pad detection
algorithm works and how the 3D-position of the UAV relative to
the landing pad is calculated. Practical experiments prove the quality of
these estimations.
We describe our work on multirotor UAVs and focus on our
method for autonomous landing. The paper describes the design of our
landing pad and its advantages. We explain how the landing pad detection
algorithm works and how the 3D-position of the UAV relative to
the landing pad is calculated. Practical experiments prove the quality of
these estimations.
-
Using the Unscented Kalman Filter in Mono-SLAM with Inverse Depth Parametrization for Autonomous Airship Control In Proc. of IEEE International Workshop on Safety Security and Rescue Robotics (SSRR), 2007.
 In this paper, we present an approach for aiding control of an autonomous airship by the means of SLAM. We show how the Unscented Kalman Filter can be applied in a SLAM context with monocular vision. The recently published Inverse Depth Parametrization is used for undelayed single-hypothesis landmark initialization and modelling. The novelty of the presented approach lies in the combination of UKF, Inverse Depth Parametrization and bearing-only SLAM and its application for autonomous airship control and UAV control in general.
In this paper, we present an approach for aiding control of an autonomous airship by the means of SLAM. We show how the Unscented Kalman Filter can be applied in a SLAM context with monocular vision. The recently published Inverse Depth Parametrization is used for undelayed single-hypothesis landmark initialization and modelling. The novelty of the presented approach lies in the combination of UKF, Inverse Depth Parametrization and bearing-only SLAM and its application for autonomous airship control and UAV control in general.