Geometric Factors for Object-Oriented SLAM
Current approaches to object-oriented SLAM (such as QuadricSLAM) lack the ability to incorporate prior knowledge of the scene geometry, such as the expected global orientation of objects.
We overcome this limitation by proposing a geometric factor that constrains the global orientation of objects in the map, depending on the objects’ semantics. This new geometric factor is a first example of how semantics can inform and improve geometry in object-oriented SLAM.
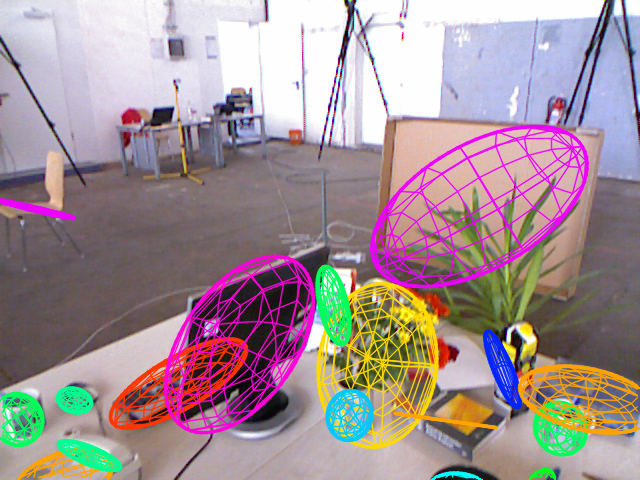
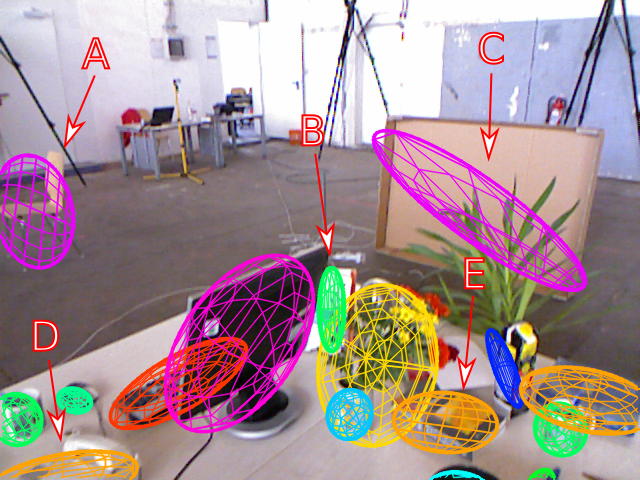
Comparing standalone QuadricSLAM (left) versus
QuadricSLAM with both orientation factors proposed in this
work (right). In this example our new factors visibly improve
the estimated quadrics around the chair (A), bottle (B),
phone (D) and book (E), resulting in a better alignment with
the true objects. The cardboard box (C) was misclassified as
a chair by the object detector (YOLO) which resulted in the
wrong orientation factor being applied.
Impressions
arXiv Preprints
- An Orientation Factor for Object-Oriented SLAM, Natalie Jablonsky, Michael Milford, Niko Sünderhauf, arXiv preprint, 2018.