Application of Biologically Inspired Methods for Autonomous Navigation and SLAM (2010)
 Since the 1970’s different types of neurons involved in spacial navigation have been identified in the brains of rats, primates and humans. Several experiments of different researchers show that these cells code the position and orientation of the animal in its environment. Neurologists and theoretical biologists have been developing models that help to understand the behaviour of animals as well as humans in different situations. These models explain the workings of the different cell assemblies and their connections with other areas in the brain.
Since the 1970’s different types of neurons involved in spacial navigation have been identified in the brains of rats, primates and humans. Several experiments of different researchers show that these cells code the position and orientation of the animal in its environment. Neurologists and theoretical biologists have been developing models that help to understand the behaviour of animals as well as humans in different situations. These models explain the workings of the different cell assemblies and their connections with other areas in the brain.
We are interested in these developements and want to derive efficient algorithms that help solving navigation tasks and SLAM on autonomous mobile robots. Our goal is explicitly not to mimic the behaviour of the involved biological processes on the level of single neurons or even spike trains. Instead, we want to understand the principles behind these biological processes and project them onto higher levels of abstraction that are suitable for implementation and application on autonomous systems.
Publications
-
Learning from Nature: Biologically Inspired Robot Navigation and SLAM – A Review Künstliche Intelligenz (German Journal on Artificial Intelligence), Special Issue on SLAM, 2010.
 In this paper we summarize the most important
neuronal fundamentals of navigation in rodents, primates
and humans. We review a number of brain cells that are
involved in spatial navigation and their properties. Furthermore,
we review RatSLAM, a working SLAM system that is
partially inspired by neuronal mechanisms underlying mammalian
spatial navigation.
In this paper we summarize the most important
neuronal fundamentals of navigation in rodents, primates
and humans. We review a number of brain cells that are
involved in spatial navigation and their properties. Furthermore,
we review RatSLAM, a working SLAM system that is
partially inspired by neuronal mechanisms underlying mammalian
spatial navigation.
-
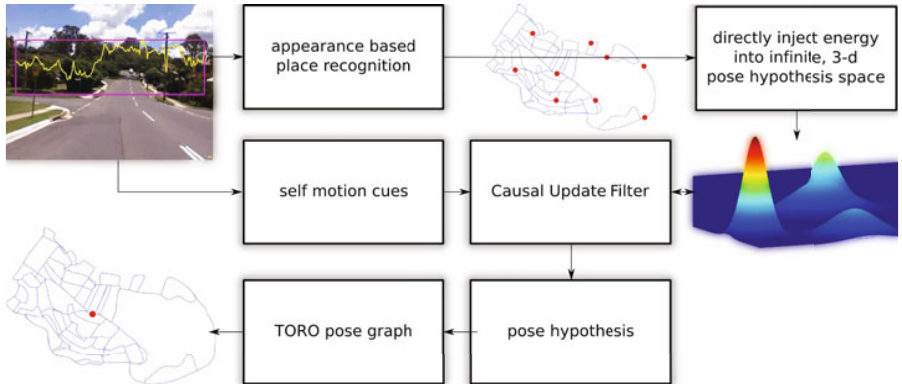
The Causal Update Filter – A Novel Biologically Inspired Filter Paradigm for Appearance Based SLAM In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), 2010.
 Recently a SLAM algorithm based on biological principles (RatSLAM) has been proposed. It was proven to perform well in large and demanding scenarios. In this paper we establish a comparison of the principles underlying this algorithm with standard probabilistic SLAM approaches and identify the key difference to be an additive update step. Using this insight, we derive the novel, non-Bayesian Causal Update filter that is suitable for application in appearance-based SLAM. We successfully apply this new filter to two demanding vision-only urban SLAM problems of 5 and 66 km length. We show that it can functionally replace the core of RatSLAM, gaining a massive speed-up.
Recently a SLAM algorithm based on biological principles (RatSLAM) has been proposed. It was proven to perform well in large and demanding scenarios. In this paper we establish a comparison of the principles underlying this algorithm with standard probabilistic SLAM approaches and identify the key difference to be an additive update step. Using this insight, we derive the novel, non-Bayesian Causal Update filter that is suitable for application in appearance-based SLAM. We successfully apply this new filter to two demanding vision-only urban SLAM problems of 5 and 66 km length. We show that it can functionally replace the core of RatSLAM, gaining a massive speed-up.
-
Beyond RatSLAM: Improvements to a Biologically Inspired SLAM System In Proc of Intel. Conf. on Emerging Technologies and Factory Automation (ETFA), 2010.
 A SLAM algorithm inspired by biological principles
has been recently proposed and shown to perform well
in a large and demanding scenario. We analyse and compare
this system (RatSLAM) and the established Bayesian
SLAM methods and identify the key difference to be an additive
update step. Using this insight, we derive a novel
filter scheme and successfully show that it can entirely replace
the core of the RatSLAM system while maintaining
its desirable robustness. This leads to a massive speedup,
as the novel filter can be calculated very efficiently.
We successfully applied the new algorithm to the same 66
km long dataset that was used with the original algorithm.
A SLAM algorithm inspired by biological principles
has been recently proposed and shown to perform well
in a large and demanding scenario. We analyse and compare
this system (RatSLAM) and the established Bayesian
SLAM methods and identify the key difference to be an additive
update step. Using this insight, we derive a novel
filter scheme and successfully show that it can entirely replace
the core of the RatSLAM system while maintaining
its desirable robustness. This leads to a massive speedup,
as the novel filter can be calculated very efficiently.
We successfully applied the new algorithm to the same 66
km long dataset that was used with the original algorithm.
-
From Neurons to Robots: Towards Efficient Biologically Inspired Filtering and SLAM In Proc. of KI 2010: Advances in Artificial Intelligence, 2010.
 We discuss recently published models of neural information process-
ing under uncertainty and a SLAM system that was inspired by the neural struc-
tures underlying mammalian spatial navigation. We summarize the derivation of
a novel filter scheme that captures the important ideas of the biologically inspired
SLAM approach, but implements them on a higher level of abstraction. This leads
to a new and more efficient approach to biologically inspired filtering which we
successfully applied to real world urban SLAM challenge of 66 km length.
We discuss recently published models of neural information process-
ing under uncertainty and a SLAM system that was inspired by the neural struc-
tures underlying mammalian spatial navigation. We summarize the derivation of
a novel filter scheme that captures the important ideas of the biologically inspired
SLAM approach, but implements them on a higher level of abstraction. This leads
to a new and more efficient approach to biologically inspired filtering which we
successfully applied to real world urban SLAM challenge of 66 km length.